Point discharge with diffusion¶
Goalie has been developed primarily with time-dependent problems in mind, since the loop structures required to solve forward and adjoint problems and do goal-oriented error estimation and mesh adaptation are rather complex for such cases. However, it can also be used to solve steady-state problems.
Consider the same steady-state advection-diffusion test case as in the motivation for the Goalie manual: the “point discharge with diffusion” test case from [Riadh et al., 2014]. In this test case, we solve
for a tracer concentration \(c\), with fluid velocity \(\mathbf u\), diffusion coefficient \(D\) and point source representation \(S\). The domain of interest is the rectangle \(\Omega = [0, 50] \times [0, 10]\).
As always, start by importing Firedrake and Goalie.
from firedrake import *
from goalie import *
We solve the advection-diffusion problem in \(\mathbb P1\) space.
mesh = RectangleMesh(200, 40, 50, 10)
fields = [Field("c", family="Lagrange", degree=1, unsteady=False)]
Point sources are difficult to represent in numerical models. Here we follow [Wallwork et al., 2022] in using a Gaussian approximation. Let \((x_0,y_0)=(2,5)\) denote the point source location and \(r=0.05606388\) be a radius parameter, which has been calibrated so that the finite element approximation is as close as possible to the analytical solution, in some sense (see [Wallwork et al., 2022] for details).
def source(mesh):
x, y = SpatialCoordinate(mesh)
x0, y0, r = 2, 5, 0.05606388
return 100.0 * exp(-((x - x0) ** 2 + (y - y0) ** 2) / r**2)
On its own, a \(\mathbb P1\) discretisation is unstable for this problem. Therefore, we include additional streamline upwind Petrov Galerkin (SUPG) stabilisation by modifying the test function \(\psi\) according to
with stabilisation parameter
where \(h\) measures cell size.
Note that mesh_seq.field_functions now returns a single
Function object since the problem is steady, so there is
no notion of a lagged solution, unlike in previous (time-dependent) demos.
With these ingredients, we can now define the get_solver() method. Don’t forget
to apply the corresponding ad_block_tag to the solve call. Additionally, we must
communicate the defined variational form to mesh_seq using the
mesh_seq.read_form() method for Goalie to utilise it during error indication.
def get_solver(mesh_seq):
def solver(index):
function_space = mesh_seq.function_spaces["c"][index]
c = mesh_seq.field_functions["c"]
h = CellSize(mesh_seq[index])
S = source(mesh_seq[index])
# Define constants
R = FunctionSpace(mesh_seq[index], "R", 0)
D = Function(R).assign(0.1)
u_x = Function(R).assign(1.0)
u_y = Function(R).assign(0.0)
u = as_vector([u_x, u_y])
# SUPG stabilisation parameter
unorm = sqrt(dot(u, u))
tau = 0.5 * h / unorm
tau = min_value(tau, unorm * h / (6 * D))
# Setup variational problem
psi = TestFunction(function_space)
psi = psi + tau * dot(u, grad(psi))
F = (
dot(u, grad(c)) * psi * dx
+ inner(D * grad(c), grad(psi)) * dx
- S * psi * dx
)
bc = DirichletBC(function_space, 0, 1)
# Communicate variational form to mesh_seq
mesh_seq.read_forms({"c": F})
solve(F == 0, c, bcs=bc, ad_block_tag="c")
yield
return solver
For steady-state problems, we do not need to specify get_initial_condition()
if the equation is linear. If the equation is nonlinear then this would provide
an initial guess. By default, all components are initialised to zero.
As in the motivation for the manual, we consider a quantity of interest that
integrates the tracer concentration over a circular “receiver” region. Since
there is no time dependence, the QoI looks just like an "end_time" type QoI.
def get_qoi(mesh_seq, index):
def qoi():
c = mesh_seq.field_functions["c"]
x, y = SpatialCoordinate(mesh_seq[index])
xr, yr, rr = 20, 7.5, 0.5
kernel = conditional((x - xr) ** 2 + (y - yr) ** 2 < rr**2, 1, 0)
return kernel * c * dx
return qoi
Finally, we can set up the problem. Instead of using a TimePartition,
we use the subclass TimeInstant, whose only input is the field list.
time_partition = TimeInstant(fields)
When creating the MeshSeq, we need to set the "qoi_type" to
"steady".
mesh_seq = GoalOrientedMeshSeq(
time_partition,
mesh,
get_solver=get_solver,
get_qoi=get_qoi,
qoi_type="steady",
)
solutions, indicators = mesh_seq.indicate_errors(
enrichment_kwargs={"enrichment_method": "p"}
)
We can plot the solution fields and error indicators as follows.
import matplotlib.colors as mcolors
from matplotlib import ticker
plot_kwargs = {"levels": 50, "figsize": (10, 3), "cmap": "coolwarm"}
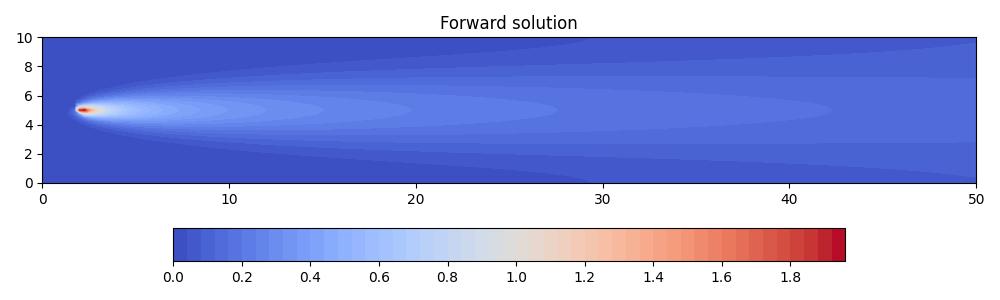
fig, axes, tcs = plot_snapshots(
solutions, time_partition, "c", "forward", **plot_kwargs
)
fig.colorbar(tcs[0][0], orientation="horizontal", pad=0.2)
axes.set_title("Forward solution")
fig.savefig("point_discharge2d-forward.jpg")
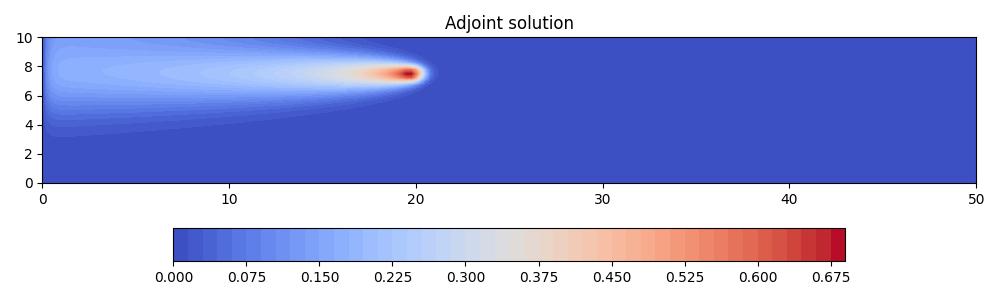
fig, axes, tcs = plot_snapshots(
solutions, time_partition, "c", "adjoint", **plot_kwargs
)
fig.colorbar(tcs[0][0], orientation="horizontal", pad=0.2)
axes.set_title("Adjoint solution")
fig.savefig("point_discharge2d-adjoint.jpg")
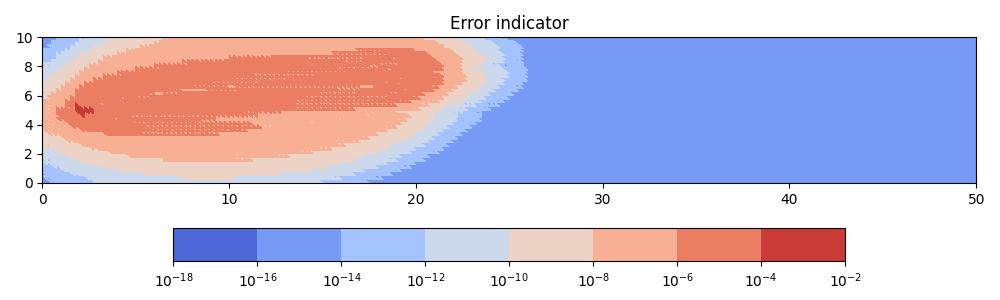
plot_kwargs["norm"] = mcolors.LogNorm()
plot_kwargs["locator"] = ticker.LogLocator()
fig, axes, tcs = plot_indicator_snapshots(
indicators, time_partition, "c", **plot_kwargs
)
cbar = fig.colorbar(tcs[0][0], orientation="horizontal", pad=0.2)
axes.set_title("Error indicator")
fig.savefig("point_discharge2d-indicator.jpg")
The forward solution is driven by a point source, which is advected from left to right and diffused uniformly in all directions.
The adjoint solution, on the other hand, is driven by a source term at the receiver and is advected from right to left. It is also diffused uniformly in all directions.
The resulting goal-oriented error indicator field is non-zero inbetween the source and receiver, implying that the largest contributions towards QoI error come from these parts of the domain. By contrast, the contributions from downstream regions are negligible.
In the next tutorial we will apply metric-based mesh adaptation to the point discharge test case considered here.
This tutorial can be dowloaded as a Python script.
References
A Riadh, G Cedric, and MH Jean. TELEMAC modeling system: 2D hydrodynamics TELEMAC-2D software release 7.0 user manual. Paris: R&D, Electricite de France, pages 134, 2014.
JG Wallwork, N Barral, DA Ham, and MD Piggott. Goal-oriented error estimation and mesh adaptation for tracer transport modelling. Computer-Aided Design, 145:103187, 2022. doi:10.1016/j.cad.2021.103187.