Object-oriented Burgers equation¶
You may have noticed that the functions get_form(),
get_solver(), get_initial_condition() and
get_qoi() all take a MeshSeq, AdjointMeshSeq
or GoalOrientedMeshSeq as input and return a function.
If this all feels a lot like writing methods for a
subclass, that’s because this is exactly what we are doing.
The constructors for MeshSeq, AdjointMeshSeq and
GoalOrientedMeshSeq simply take these functions and adopt
them as methods. A more natural way to write the subclass yourself.
In the following, we mostly copy the contents from the previous
demos and combine the methods into a subclass called
BurgersMeshSeq. The main difference to note is that
get_qoi() should get the annotate_qoi() decorator
so that it gets modified internally to account for annotation.
from firedrake import *
from goalie_adjoint import *
set_log_level(DEBUG)
class BurgersMeshSeq(GoalOrientedMeshSeq):
@staticmethod
def get_function_spaces(mesh):
return {"u": VectorFunctionSpace(mesh, "CG", 2)}
def get_form(self):
def form(index):
u, u_ = self.fields["u"]
# Define constants
R = FunctionSpace(self[index], "R", 0)
dt = Function(R).assign(self.time_partition.timesteps[index])
nu = Function(R).assign(0.0001)
# Setup variational problem
v = TestFunction(u.function_space())
F = (
inner((u - u_) / dt, v) * dx
+ inner(dot(u, nabla_grad(u)), v) * dx
+ nu * inner(grad(u), grad(v)) * dx
)
return {"u": F}
return form
def get_solver(self):
def solver(index):
u, u_ = self.fields["u"]
# Define form
F = self.form(index)["u"]
# Time integrate from t_start to t_end
t_start, t_end = self.subintervals[index]
dt = self.time_partition.timesteps[index]
t = t_start
qoi = self.get_qoi(index)
while t < t_end - 1.0e-05:
solve(F == 0, u, ad_block_tag="u")
if self.qoi_type == "time_integrated":
self.J += qoi(t)
yield
u_.assign(u)
t += dt
return solver
def get_initial_condition(self):
fs = self.function_spaces["u"][0]
x, y = SpatialCoordinate(self[0])
return {"u": assemble(interpolate(as_vector([sin(pi * x), 0]), fs))}
@annotate_qoi
def get_qoi(self, i):
R = FunctionSpace(self[i], "R", 0)
dt = Function(R).assign(self.time_partition.timesteps[i])
def end_time_qoi():
u = self.fields["u"][0]
return inner(u, u) * ds(2)
def time_integrated_qoi(t):
u = self.fields["u"][0]
return dt * inner(u, u) * ds(2)
if self.qoi_type == "end_time":
return end_time_qoi
else:
return time_integrated_qoi
Notice that the get_solver() and get_qoi_function()
methods have been modified to account for both "end_time" and
"time_integrated" QoIs.
We apply exactly the same setup as before, except that the
BurgersMeshSeq class is used.
n = 32
meshes = [UnitSquareMesh(n, n, diagonal="left"), UnitSquareMesh(n, n, diagonal="left")]
end_time = 0.5
dt = 1 / n
num_subintervals = len(meshes)
time_partition = TimePartition(
end_time, num_subintervals, dt, ["u"], num_timesteps_per_export=2
)
mesh_seq = BurgersMeshSeq(time_partition, meshes, qoi_type="time_integrated")
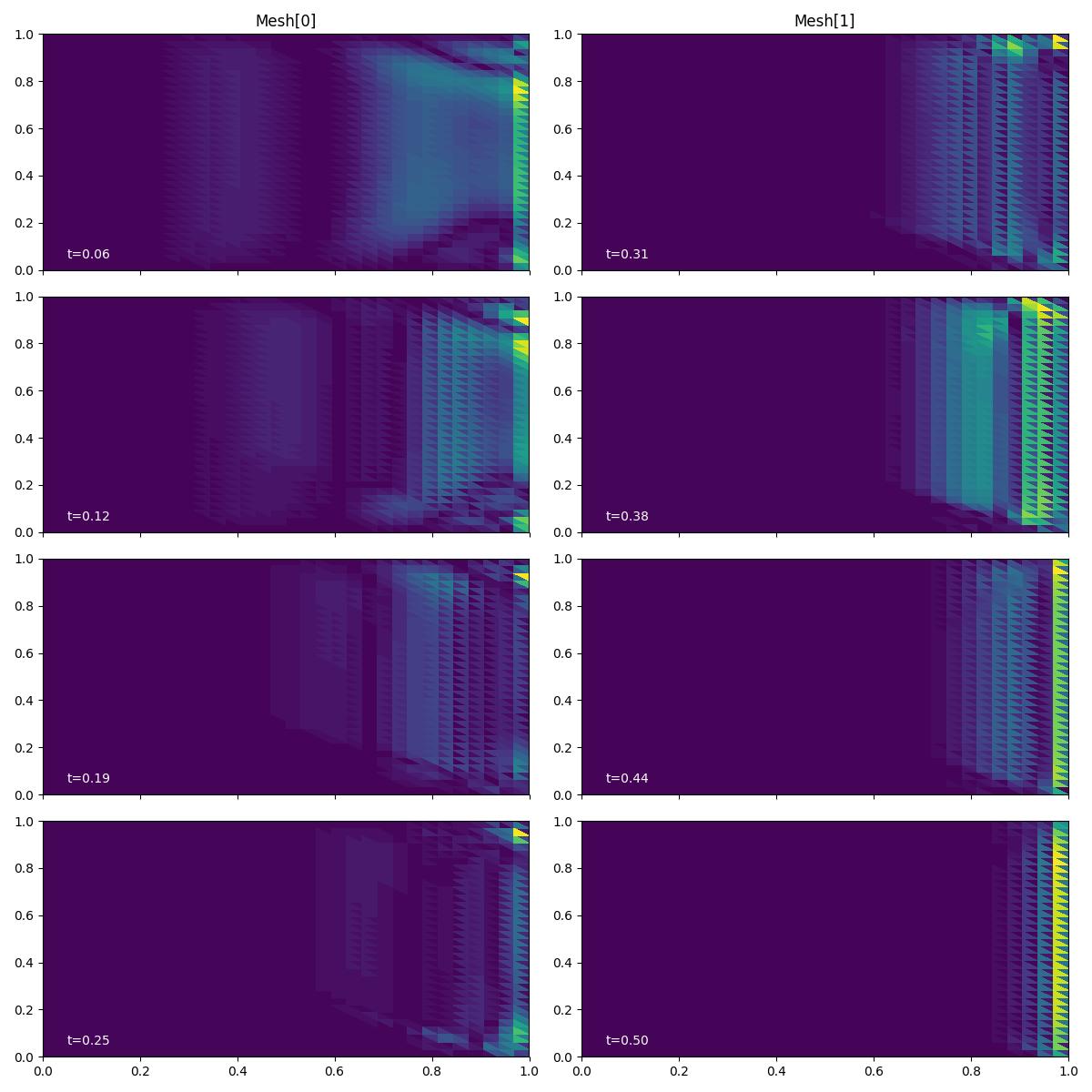
solutions, indicators = mesh_seq.indicate_errors(
enrichment_kwargs={"enrichment_method": "h"}
)
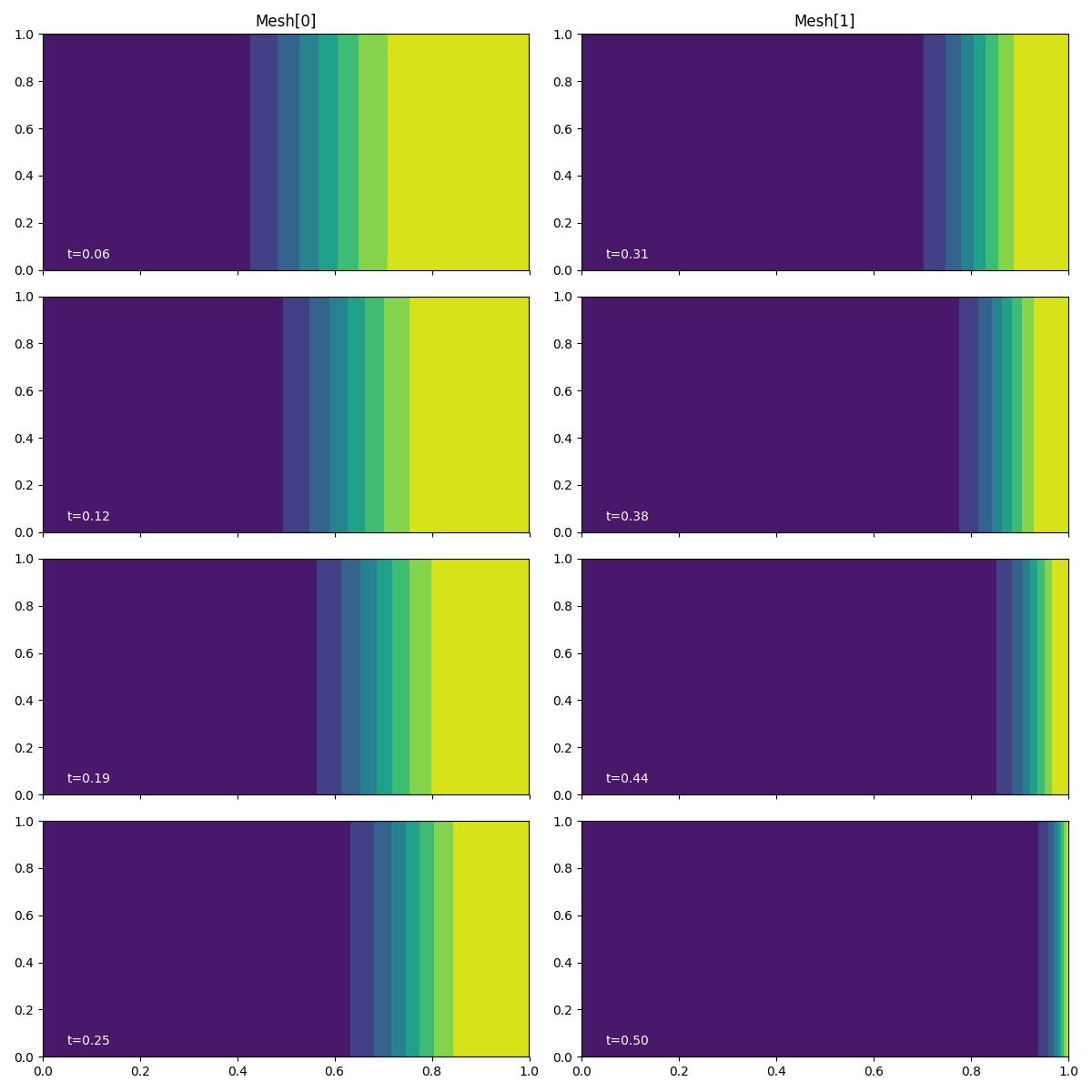
Plotting this, we find that the results are consistent with those generated previously.
fig, axes, tcs = plot_indicator_snapshots(indicators, time_partition, "u", levels=50)
fig.savefig("burgers-oo_ee.jpg")
fig, axes, tcs = plot_snapshots(solutions, time_partition, "u", "adjoint")
fig.savefig("burgers-oo-time_integrated.jpg")
In the next demo, we move on from Burgers equation to consider a linear advection example with a rotational velocity field.
This demo can also be accessed as a Python script.