Adjoint Burgers equation with a time integrated QoI¶
So far, we only considered a quantity of interest corresponding to a spatial integral at the end time. For some problems, it is more suitable to have a QoI which integrates in time as well as space.
Begin by importing from Firedrake and Goalie.
from firedrake import *
from goalie import *
Redefine the mesh, fields and get_initial_condition function as in the previous
demo.
n = 32
mesh = UnitSquareMesh(n, n)
fields = [Field("u", family="Lagrange", degree=2, vector=True)]
def get_initial_condition(mesh_seq):
fs = mesh_seq.function_spaces["u"][0]
x, y = SpatialCoordinate(mesh_seq[0])
return {"u": Function(fs).interpolate(as_vector([sin(pi * x), 0]))}
The solver needs to be modified slightly in order to take account of time dependent
QoIs. The Burgers solver uses backward Euler timestepping. The corresponding
quadrature routine is like the midpoint rule, but takes the value from the next
timestep, rather than the average between that and the current value. As such, the QoI
may be computed by simply incrementing the J attribute of the
AdjointMeshSeq as follows.
def get_solver(mesh_seq):
def solver(index):
u, u_ = mesh_seq.field_functions["u"]
# Define constants
R = FunctionSpace(mesh_seq[index], "R", 0)
dt = Function(R).assign(mesh_seq.time_partition.timesteps[index])
nu = Function(R).assign(0.0001)
# Setup variational problem
v = TestFunction(u.function_space())
F = (
inner((u - u_) / dt, v) * dx
+ inner(dot(u, nabla_grad(u)), v) * dx
+ nu * inner(grad(u), grad(v)) * dx
)
# Time integrate from t_start to t_end
t_start, t_end = mesh_seq.subintervals[index]
dt = mesh_seq.time_partition.timesteps[index]
t = t_start
qoi = mesh_seq.get_qoi(index)
while t < t_end - 1.0e-05:
solve(F == 0, u, ad_block_tag="u")
mesh_seq.J += qoi(t)
yield
u_.assign(u)
t += dt
return solver
The QoI is effectively just a time-integrated version of the one previously seen.
Note that in this case we multiply by the timestep. It is wrapped in a
Function from ‘R’ space to avoid recompilation if the value is changed.
def get_qoi(mesh_seq, i):
R = FunctionSpace(mesh_seq[i], "R", 0)
dt = Function(R).assign(mesh_seq.time_partition.timesteps[i])
def time_integrated_qoi(t):
u = mesh_seq.field_functions["u"][0]
return dt * inner(u, u) * ds(2)
return time_integrated_qoi
We use the same time partitioning as in the previous demo, except that we export every timestep rather than every other timestep.
end_time = 0.5
dt = 1 / n
num_subintervals = 2
time_partition = TimePartition(
end_time, num_subintervals, dt, fields, num_timesteps_per_export=1
)
The only difference when defining the AdjointMeshSeq is that we specify
qoi_type="time_integrated", rather than qoi_type="end_time".
mesh_seq = AdjointMeshSeq(
time_partition,
mesh,
get_initial_condition=get_initial_condition,
get_solver=get_solver,
get_qoi=get_qoi,
qoi_type="time_integrated",
)
solutions = mesh_seq.solve_adjoint()
fig, axes, tcs = plot_snapshots(solutions, time_partition, "u", "adjoint")
fig.savefig("burgers-time_integrated.jpg")
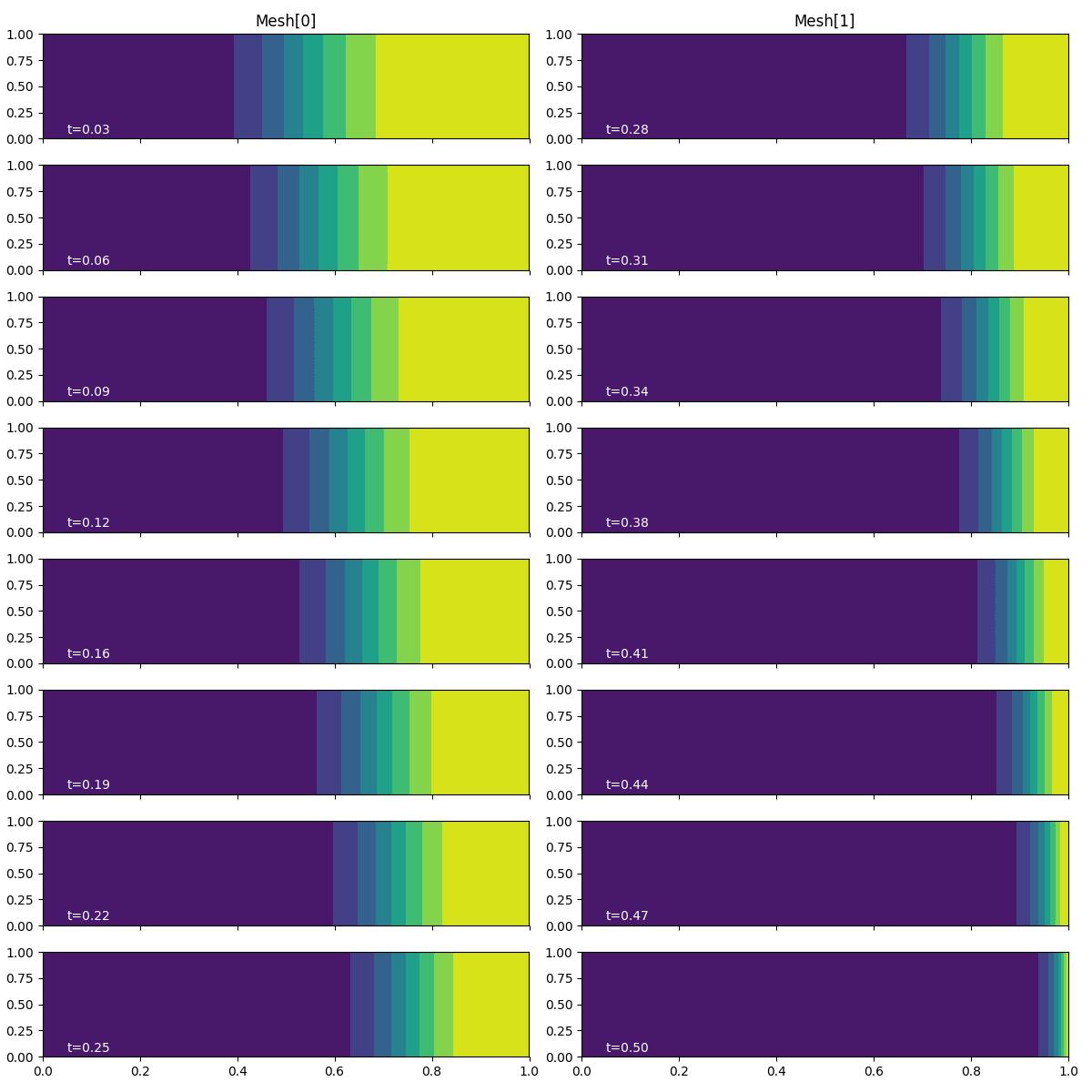
With a time-integrated QoI, the adjoint problem has a source term at the right-hand boundary, rather than a instantaneous pulse at the terminal time. As such, the adjoint solution field accumulates at the right-hand boundary, as well as propagating westwards.
In the next demo, we solve the Burgers problem one last time, but using an object-oriented approach.
This demo can also be accessed as a Python script.